

Līdz ar straujo intelektuālās ražošanas un robotikas attīstību humanoīdu robotu veiklā roka kļūst arvien svarīgāka kā līdzeklis mijiedarbībai ar ārpasauli. Veiklās rokas pamatā ir cilvēka rokas sarežģītā struktūra un funkcija, kas ļauj robotiem veikt dažādus uzdevumus, piemēram, satveršanu, manipulēšanu un pat uztveršanu. Līdz ar rūpnieciskās automatizācijas un mākslīgā intelekta tehnoloģiju nepārtrauktu attīstību veiklās rokas pakāpeniski pāriet no viena atkārtota uzdevuma veicēja uz inteliģentu ķermeni, kas spēj veikt sarežģītus un mainīgus uzdevumus. Šajā transformācijas procesā pakāpeniski parādījās vietējo veiklo roku konkurētspēja, īpaši piedziņas ierīcēs, transmisijas ierīcēs, sensoru ierīcēs utt., lokalizācijas process ir ātrs, un izmaksu priekšrocība ir acīmredzama.
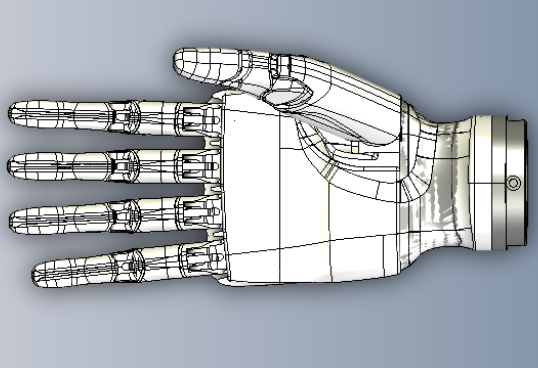
PlanēturOllerssapkalpesir humanoīda robota "ekstremitāšu" centrālā daļa un tās var izmantot dažādos pielietojumos, tostarp rokās, kājās un veiklās plaukstās, lai nodrošinātu precīzu lineāras kustības kontroli. Tesla Optimus rumpī rokā ir 14 rotējoši savienojumi, 14 lineāri savienojumi un 12 dobi kausveida savienojumi. Lineārajos savienojumos tiek izmantotas 14 apgrieztas planētu rullīšu skrūves (2 elkoņā, 4 plaukstas locītavā un 8 kājā), kas ir iedalītas trīs izmēros: 500 N, 3900 N un 8000 N, lai pielāgotos dažādu locītavu slodzes nestspējas vajadzībām.
Tesla apgriezto planētu rullīšu skrūvju izmantošana savā humanoīdajā robotā Optimus varētu būt balstīta uz to priekšrocībām veiktspējā, īpaši attiecībā uz kravnesību un stingrību. Tomēr nevar izslēgt, ka humanoīdie roboti ar zemākām kravnesības prasībām izmanto lētākas lodīšu skrūves.
Bumbasapkalpes dažādās nozarēs plašā pielietojumu klāstā un atbilstoši tirgus pieprasījumam:
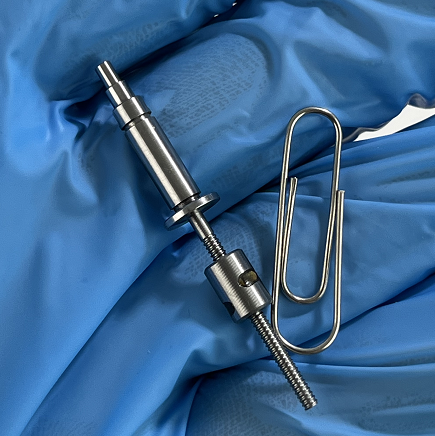
2024. gada Pekinas robotikas izstādē KGG izstādīja 4 mm diametra planetāro rullīšu skrūves un 1,5 mm diametra lodīšu skrūves; turklāt KGG demonstrēja arī veiklās rokas ar integrētiem planetāro rullīšu skrūvju risinājumiem.


4 mm diametra planetārās rullīšu skrūves


1. Pielietojumi jaunās enerģijas automašīnās: Attīstoties automobiļu elektrifikācijai un intelektualizācijai, tiek pielietotsbumbaskrūvesautomobiļu jomā ir padziļinājusies, piemēram, automobiļu riteņu malas vadu bremžu sistēma (EMB), aizmugurējo riteņu stūres sistēma (iRWS), stūres vadības sistēma (SBW), piekares sistēma utt., kā arī automobiļu detaļu regulēšanas un vadības ierīces.
2. Darbgaldu nozares pielietojums: lodīšu skrūve ir viena no darbgaldu standarta pamatkomponentēm, darbgaldos ir rotācijas asis un lineārās asis, lineārās asis sastāv no skrūvēm unvadotnes sliedeslai panāktu precīzu sagataves pozicionēšanu un kustību. Tradicionālie darbgaldi galvenokārt izmanto trapecveida skrūves/bīdāmās skrūves, CNC darbgaldi ir balstīti uz tradicionālajiem darbgaldiem, pievienojot digitālās vadības sistēmas, piedziņas sagataves precizitātes prasības ir augstākas, un pašlaik tiek izmantots vairāk lodīšu skrūvju. Globālā darbgaldu rūpnīcu piegādes ķēde vārpstas, svārsta galvas, rotējošā galda un citu funkcionālo komponentu ražošanā lielākajā daļā darbgaldu rūpnīcu pielāgošanas vai diferenciācijas apsvērumu dēļ parasti tiek ražota pašu spēkiem, bet velmēšanas funkcionālās sastāvdaļas būtībā visas tiek ārpakalpojumā, un darbgaldu nozare modernizē velmēšanas funkcionālās sastāvdaļas, lai nodrošinātu ilgtspējīgu izaugsmi, nodrošinot spēcīgu stabilitāti.


1,5 mm diametra lodīšu skrūves
3. Humanoīdu robotu pielietojums: Humanoīdu robotu izpildmehānismi ir iedalīti divu programmu hidrauliskajos un motorizētajos mehānismos. Hidrauliskajam mehānismam, lai gan tā veiktspēja ir labāka, izmaksas un uzturēšanas izmaksas ir augstākas, un to pašlaik izmanto mazāk. Motorizētais risinājums ir pašreizējā galvenā izvēle, planētu rullīšu skrūvei ir liela nestspēja, un tā ir galvenā sastāvdaļa.lineārais izpildmehānismshumanoīda robota, ko izmanto, lai precīzi kontrolētu robota locītavas. Šo tehnoloģiju izmantoja ārzemju Tesla, Vācijas LOLA robots Minhenes Universitātē, vietējā Politehniskā universitāte Huahui un Kepler.
Planētu veltņu skrūvju gadījumā pašreizējo vietējo planētu veltņu skrūvju tirgu galvenokārt aizņem ārvalstu ražotāji, vadošo ārvalstu ražotāju Šveices Rollvis, Šveices GSA un Zviedrijas Ewellix tirgus daļa veidoja 26%, 26% un 14%.
Vietējiem uzņēmumiem planētu veltņu skrūvju pamattehnoloģijās un ārvalstu uzņēmumiem pastāv zināma atšķirība, taču vadības precizitātes, maksimālās dinamiskās slodzes, maksimālās statiskās slodzes un citos veiktspējas aspektos tie pakāpeniski panāk, un vietējo planētu veltņu skrūvju ražotāju kopējā tirgus daļa ir 19%.
Publicēšanas laiks: 2025. gada 28. februāris




